

Das Cockpit des Tesla Model 3 ist noch „cleaner“, also noch aufgeräumter als ohnehin schon. Nur das senkrecht stehende Tablet in der Mittelkonsole unterbricht die streng geometrischen Linien des Innenraums. Trotzdem beschleunigt das Elektroauto mit voller Kraft und feuert so schnell um die Ecke, dass sich die Passagiere festhalten müssen. Mit nur einer kurzen Bewegung der rechten Hand richten wir das Fahrzeug wieder gerade aus und bremsen gleich darauf die nächste Kurve an.
Statt mit Lenkrad und Fußpedalen steuern wir das Auto mit einem Vier-Wege-Joystick. Bewegungen nach links und rechts geben die Richtung vor, drückt man den kleinen Hebel nach vorne, greifen die Bremsen zu. Und zieht man den Hebel nach hinten, nimmt der Tesla Fahrt auf. Gewissermaßen wie in einem Videospiel, hier nur unter realen Bedingungen auf echten Straßen. Jeder Fehler wäre verhängnisvoll, doch der Stromer reagiert sofort und zuverlässig auf kleinste Bewegungen der rechten Hand.

Das Steuern des Elektroautos nur per Pedal und Joystick ist noch etwas gewöhnungsbedürftig, wie man unserem Autor ansieht.
Ein Muster ohne Wert? Ein Spaßprojekt? Von wegen! „So wird in Zukunft Auto gefahren. Ohne das Kurbeln am Lenkrad“, erklärt Hubert Hügle, der Entwicklungschef des Joint Ventures Schaeffler-Paravan.
Version 3.0 kommt schon 2023
Anschließend steigen wir in einen VW Arteon und danach in einen Mercedes-AMG C63 – um die Fortschritte der Space Drive-by-Wire-Technik zu erfahren. Während im VW die Lenkung noch sehr synthetisch reagiert, ist das bei der Version 2.8, die im Mercedes verbaut ist, schon eine ganz andere Hausnummer. Die Lenkung ist verbindlicher und fühlt sich natürlicher an. Ein großer Schritt, für den etliche Test-Kilometer und Simulationsstunden nötig waren.
Die nächste Ausbaustufe wird die Nummer 3.0 sein, die Mitte 2023 auf den Markt kommt. Dann entwickelt sich Space Drive zu einem Add-On-System, das nachträglich in die Fahrzeugsysteme integriert werden kann. Das Modul erfüllt auch den wichtigen Sicherheitsstandard ISO 26262, der die Grundlage für die spätere Serienfertigung darstellt.

Die schlanke Steuereinheit auf der Mittelkonsole des VW Arteon ist noch ein Provisorium – der klassische Wahlhebel bleibt noch.
Außerdem finden viele Detail-Verbesserungen statt. Zum Beispiel wird die Kraftübertragung beziehungsweise das Feedback ohne Zahnriemen geschehen. Und die Bauteile wie Aktuatoren und Platinen werden schrumpfen. Die Technik ist so bahnbrechend, dass mit Schaeffler ein großer Autozulieferer zugegriffen hat. Entstanden ist so das Joint-Venture Schaeffler-Paravan.
Schlüsseltechnologie fürs autonome Fahren
Das Ziel der Zusammenarbeit ist es, Drive-by-Wire serienreif zu entwickeln. Also das Steuern eines Autos über Kabel, ohne Lenkradsäule und Fußpedale. Letztendlich geht es um nicht weniger als die Schlüsseltechnologie für das autonome Fahren. Daran tüftelt gerade die gesamte Automobilindustrie.
„Wir hatten schon alle hier. Auch Hersteller wie Audi, BMW oder Mercedes“, erzählt Hügle. Was macht ausgerechnet das kleine Unternehmen aus Baden-Württemberg so interessant, das sich auf die Entwicklung von elektrischen Rollstühlen und den behindertengerechten Umbau von Pkws spezialisiert hat? In der Frage liegt schon ein Teil der Antwort. Denn mit einem körperlichen Handicap ist das traditionelle Bewegen eines Autos oft nicht mehr möglich.
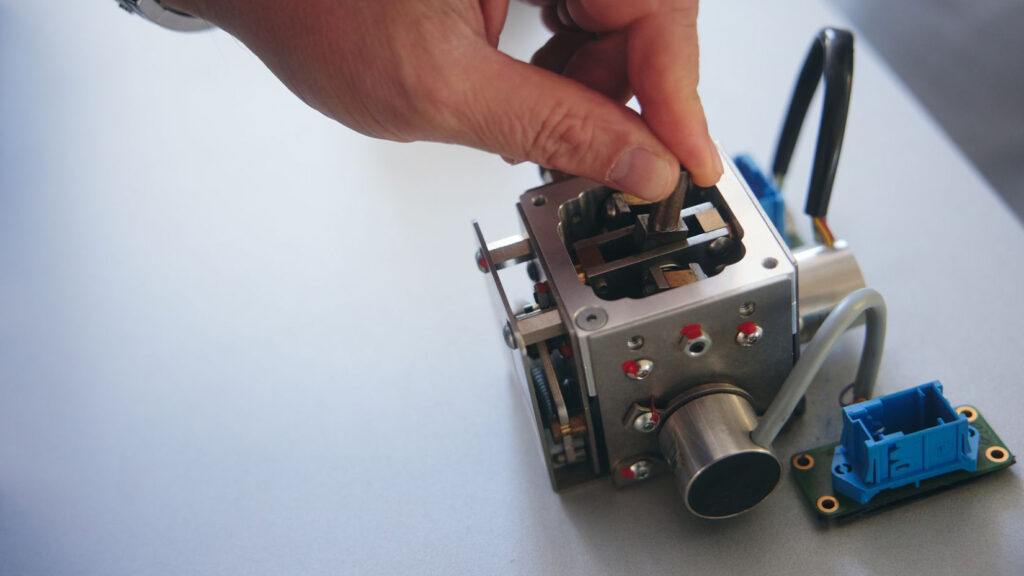
In vier Richtungen lässt sich die Steuereinheit bewegen. Drückt man den Hebel nach vorne, bremst das Auto, bei der Bewegung nach hinten beschleunigt es. Gelenkt wird mit Bewegungen nach rechts und nach links. Fotos: Schaeffler-Paravan
Also ersann Firmengründer Roland Arnold vor mehr als 20 Jahren mit Space Drive eine Möglichkeit, ein Fahrzeug mit einem Joystick zu bewegen. An der Schwelle zum Drive-by-Wire und dem autonomen Fahren sind diese Erfahrungen heute Gold wert. Hubert Hügle beziffert den Technologie-Vorsprung des Joint Ventures gegenüber den Wettbewerbern auf etwa drei Jahre.
Lenkrad-Hersteller sollten sich Gedanken machen
„Wenn ich Lenkungen und Lenkräder herstellen würde, würde ich mir Gedanken machen“, sagt Hügle. In Zukunft wird man die Fahrzeuge mit zwei Joysticks oder einem starren Volant mit einem kurzen Druck um die Ecke zirkeln. „Daran gewöhnt man sich ruckzuck, und man ist auch schneller, weil man keinen Weg zurücklegen muss“, erklärt Ingenieur Alexander Uphoff. Bald wird es auch möglich sein, die Charakteristik der Lenkung per Knopfdruck radikal zu verändern. Einparken mit nur wenig Lenkwinkel oder ultradirekt auf der Rennstrecke.
Und damit enden die Möglichkeiten nicht. Wenn der Fahrer dabei ist, die Kontrolle über das Auto zu verlieren, kann das System schon gegenlenken, ehe der Mensch überhaupt die Gefahr registriert. Dazu nutzt das System die Daten, die die Sensoren der Fahrassistenten. Darunter Lenkwinkel, Schlupf, Stellung der Räder, Giermoment oder auch die Position des Gaspedals. Auch die Lenkeinflüsse sind dann individuell konfigurierbar. Zum Beispiel wird es möglich sein, Schläge aufgrund der unebenen Fahrbahn abzufedern und dennoch eindeutig mitzuteilen.

Seit 2021 dient ein Mercedes-AMG GT3 – eingesetzt von Mücke Motorsport und gefahren in diesem Jahr von Maximilian Buhk – in der DTM der Erprobung der digitalen Lenktechnologie Space Drive von Schaeffler-Paravan.
Schaeffler-Paravan testet diese Drive-by-Wire-Lenkung bereits in der DTM an einem Mercedes-AMG GT3 von Mücke Motorsport. Im Rennsport geht es um Hundertstelsekunden und wenn ein Pilot weniger Kraft aufwenden muss, bleibt er länger hoch konzentriert. Im Prinzip ist diese Technik nichts anderes als das Lenkrad bei einem Videospiel, bei dem ein Elektromotor das Force Feedback simuliert. Tatsächlich war ein solches System der Ausgangspunkt. Doch die Rückmeldung war natürlich viel zu grobschlächtig, als dass man damit ein echtes Auto nur annähernd schnell bewegen könnte.
Tausende Testkilometer
„Bei Regen haben die Fahrer das Auto abgestellt, weil sie sich bei dem Ausgangssystem nicht mehr sicher fühlten“, so Hügle. Also musste noch eine Menge Entwicklungsarbeit geleistet werden. „Wer glaubt, dass man einfach ein paar Simulationen laufen lässt, täuscht sich gewaltig“, weiß Alexander Uphoff. Das fängt schon damit an, dass der durch den Elektromotor hergestellte Lenkwinkel einhergeht mit der Stellung der Räder, die ebenfalls von E-Maschinen mit Hilfe von Aktuatoren herbeigeführt wird. Es muss sich natürlich anfühlen – beziehungsweise den Erwartungen des Menschen entsprechen.

Jedes Auto ist vollgestopft mit Messgeräten, die bei den Tests unzählige Daten aufzeichnen und speichern – zur Optimierung der Software, mit denen die Elektromotoren gesteuert werden.
Der harte Testalltag besteht aus unzähligen Runden und dem Interpretieren von Daten. Jedes Auto ist vollgestopft mit Messgeräten. Das feinfühlige „Popometer“ der Profipiloten ist wichtig, um eine Software zu schreiben, die die Elektromoren steuert und für die vertrauenserweckende Rückmeldung sorgt. Für die Rennfahrer ist das harte Arbeit. Es geht nicht um Rekorde, sondern um reproduzierbare Runden mit möglichst identischen Zeiten. Nur so kann ein Phänomen sicher festgestellt und die richtigen Rückschlüsse gezogen werden.
Sobald der Fahrer in einer Kurve ein Untersteuern feststellt, schauen die Ingenieure nach, wie sich die Telemetriedaten veränderten haben und versuchen so Rückschlüsse für die Software des Drive-by-Wire-Systems zu ziehen. Immer und immer wieder. Unzählige Kilometer sind nötig, um diese sogenannte „Real Time Operation Software“ (RTOS) zu perfektionieren und so das Autofahren der Zukunft zu realisieren. Letztendlich autonom, ohne Lenkrad, aber mit Software und Stellmotoren.
In der DTM fahren keine GT- Fahrzeuge.
?https://www.dtm.com/de/wertung